1. Introduction
The complex structure, numerous equipment, system cross-linking and diverse flight environment of aircraft make it easy to have faults. The flight control system is the core system of the aircraft, in which the sensor is used to transmit the real-time measured aircraft flight state parameters to the flight control system. Therefore, the state of the sensor will directly affect the flight state [
1,
2]. Once a fault occurs, it will cause the sensor to transmit the wrong information to the flight control system, which may cause greater economic losses and even endanger people’s lives. Therefore, the diagnosis of aircraft sensors is essential to ensure aircraft flight safety [
3,
4].
The traditional fault diagnosis methods consist of mainly two types, one is based on signal analysis or artificial feature extraction [
5,
6], and the other is based on models [
7,
8]. Among them, a common application of the first method is to determine whether a fault occurs by designing a threshold value and comparing whether the signal reaches the threshold value [
9]. Other methods based on manual feature extraction have also been widely studied. A fault diagnosis method based on signal decomposition and two-dimensional feature clustering is designed to diagnose battery status [
10]. The data processing method of high-speed railway fault signal diagnosis based on MapReduce algorithm was designed [
11]. Statistical method and wavelet packet decomposition method are used for feature extraction of vibration signal to identify the fault type of rotor [
12].
The model-based method refers to establishing the model of the object to be diagnosed, and analyzing the situation when various faults occur by setting different types of faults in the model. Fault diagnosis is realized through the corresponding relationship between the output difference of the model in different faults and the fault type. A review of model-based fault diagnosis methods was published, focusing on fault detection and fault estimation [
13]. N. Valceschini et al. proposed a model-based fault detection and isolation scheme for the transmission components of electro-mechanical actuators, which was applied to the drive of sliding doors [
14]. In addition, a model-based battery fault diagnosis method is proposed, which is based on multiple equivalent circuit models [
15]. In addition, Wang et al. established the equivalent circuit model of battery pack insulation fault diagnosis using the high fidelity unit model [
16].
However, the two traditional methods mentioned above have some limitations, specifically , the method based on signal analysis diagnoses by manually selecting feature types, which is difficult to avoid the problem of insufficient representation of selected features [
17]. The main problem of model-based method is that it requires high accuracy of the model, and it is no longer applicable when the object changes a little. With the development of machine learning and artificial intelligence technology, data-driven fault diagnosis method is very popular in recent years because of its advantages of automatically exploring the characteristics of signals and high applicability. More and more data driven diagnostic methods with higher accuracy have emerged [
18,
19,
20,
21,
22,
23]. A data driven method based on improved Elman neural network was proposed to realize the fast diagnosis of open circuit fault of IGBT [
18]. Nicholas et al. [
19] proposed a general robust data-driven scheme for fault detection, isolation and estimation of multiple sensor faults, and verified it with multiple flight data records. A fault diagnosis method based on Deep belief network (DBN) to generate local random graph to intuitively explain the fault action mechanism was proposed, which realized the diagnosis of different faults of air conditioner [
20] Guo et al. [
21] established a predictive model for photovoltaic power generation under normal conditions through clustering algorithm and long short-term memory neural network (LSTM), and used the predictive model to conduct quantitative fault diagnosis through transfer learning. In addition, some work related to fault diagnosis combines signal based and data-driven, or uses the transfer learning strategy [
24,
25,
26,
27] to achieve high-precision fault diagnosis results.
Different types of machine learning models have been targeted for development and used in data-driven diagnosis. However, there are still two problems in the processing of input data: the type of input signal data is single, which has no advantage in ensuring the integrity of data information; in a small amount of work considering multiple input signals, the importance of different signals is rarely considered, which is not conducive to subsequent feature extraction and fault classification. In addition, in view of the fact that most of the deep learning diagnosis models cannot give consideration to both time cost and computational efficiency, this paper also proposes a targeted scheme.
Specifically, the innovation points of this paper are as follows:
- (i)
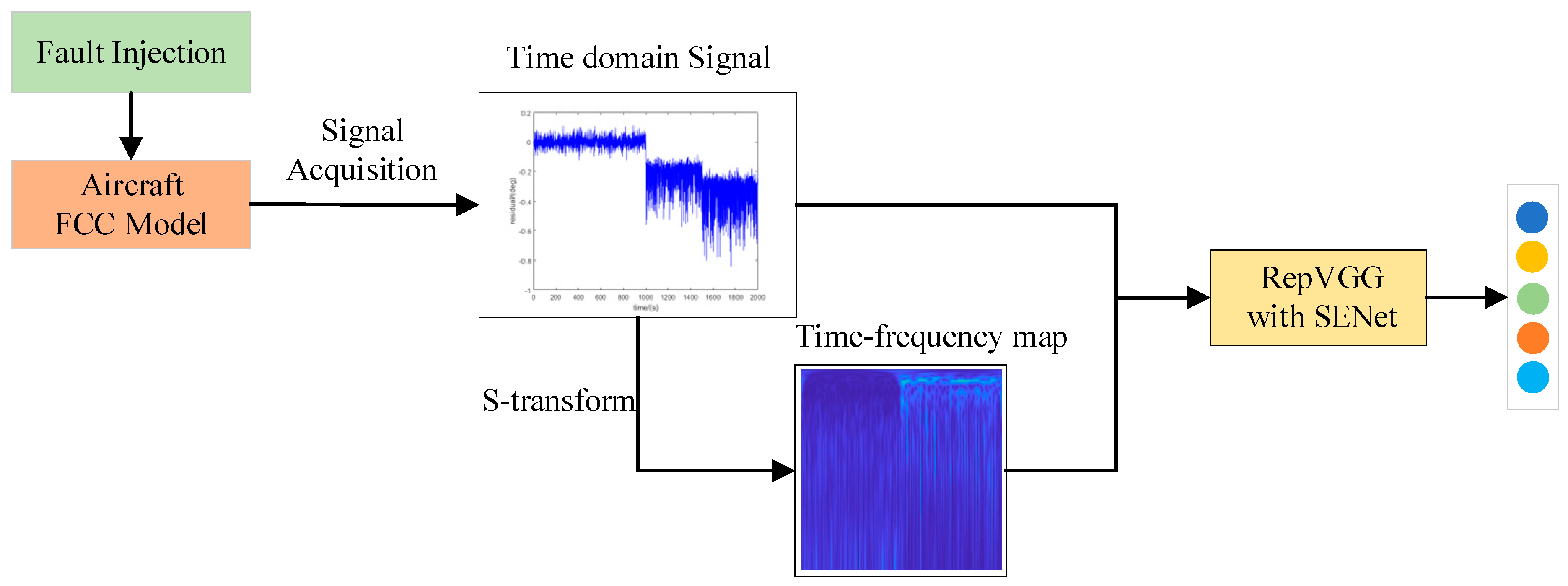
The time sequence signal of aircraft attitude sensor is transformed into time-frequency domain, and the time-domain signal and time-frequency domain signal are taken as the feature mining object.
- (ii)
A signal representation weight analysis and allocation strategy is designed, and the representativeness of each channel of time-domain signal and time-frequency signal is analyzed by using Squeeze-and-excitation networks (SENet) attention mechanism.
- (iii)
A fast and high-precision diagnostic technology based on Re-parameterization visual geometry group (RepVGG) is proposed, which achieves a good diagnostic accuracy speed tradeoff.
The following text is arranged as follows: the relevant theories and methods are given in
Section 2.
Section 3 describes the experimental setup and the preparation process of the fault data set, including fault model building and data collection, experimental parameter settings, etc. The
Section 4 presents the experimental results and discussions.
Section 5 summarizes the full text.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}